
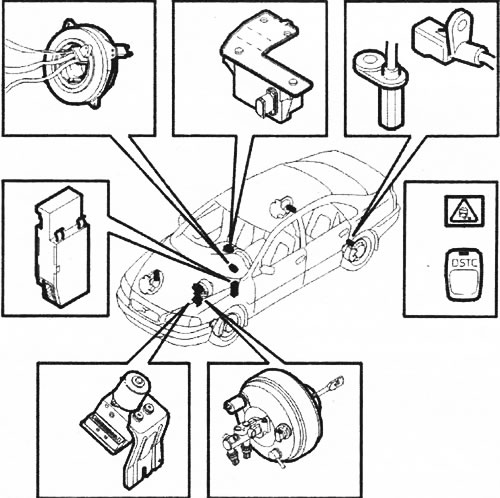
(ВСМ) с DSTC использует непрерывно поступающую информацию от различных датчиков в системе для вычисления положений рулевого колеса и автомобиля. (ВСМ) вычисляет манеру вождения водителя, измеряя угол рулевого колеса, крутящий момент двигателя, скорость автомобиля и тормозное давление. (ВСМ) также вычисляет поведение автомобиля путем слежения за углом рулевого колеса, скоростью изменения угла рулевого колеса, скоростью изменения величины поворота вокруг вертикальной оси и поперечным ускорением. Когда разница между движениями водителя и поведением автомобиля превышает определенную точку, активное управление поворотом вокруг вертикальной оси ограничивает крутящий момент двигателя для поддержания поперечной устойчивости при всевозможных условиях движения. Функция активного поворота вокруг вертикальной оси также активирует усилитель тормозов и управление отдельным тормозом для управления клапанами разделения гидравлического модулятора, электронными челночными клапанами и впускными и выпускными клапанами, которые корректируют автомобиль в случае заноса.
Активное управление поворотом вокруг вертикальной оси
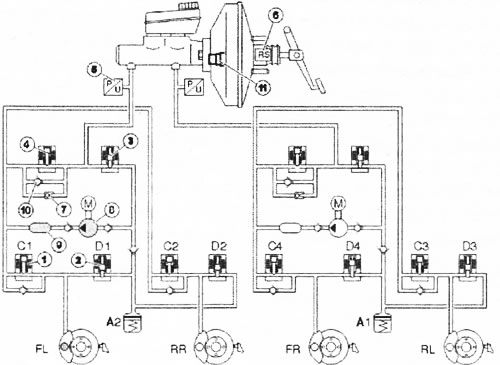
1. Впускной клапан, обычно открыт; 2. Выпускной клапан, обычно закрыт; 3. Электронный челночный клапан, обычно закрыт; 4. Клапан разделения, обычно открыт; 5. Датчик тормозного давления; 6. Датчик давления педали; 7. Обводной клапан; 8. Гидравлический насос; 9. Поглотитель давления; 10. Обратный клапан; 11. Клапан нагнетания давления
Во время активного управления поворотом вокруг вертикальной оси при заносе автомобиля открывается вакуумный клапан на усилителе тормозов. Затем усилитель тормозов быстро нагнетает давление без активирования водителем педали тормоза. Одновременно запускается гидравлический насос (8) и нагнетает тормозное давление. Гидравлический насос принимает управление торможением после начальной фазы. (ВСМ) затем активирует клапаны в гидравлическом модуляторе и проверяет силы торможения для каждого отдельного колеса, отдельно повышая, поддерживая или снижая давление, чтобы стабилизировать автомобиль. Педаль тормоза перемещается вверх и вниз во время активирования. Если водитель нажмет на педаль тормоза во время работы контроля устойчивости, модуль управления, посредством датчика давления педали (6) в усилителе тормозов, учтет давление, произведенное водителем в контроле устойчивости.
Активное управление поворотом вокруг вертикальной оси, избыточная поворачиваемость
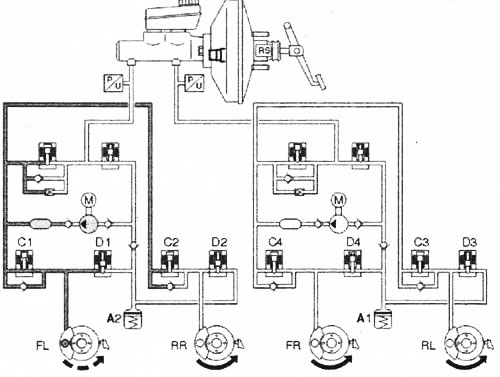
Избыточная поворачиваемость является очень опасным состоянием, которое среднему водителю трудно контролировать. Избыточная поворачиваемость - это когда автомобиль поворачивает больше, чем было повернуто рулевое колесо. Если это не откорректировать, избыточная поворачиваемость может привести к бесконтрольному вращению автомобиля. В приведенном выше примере показан поворот автомобиля вправо при избыточной поворачиваемости. Чтобы противодействовать этому, система DSTC закрыла клапан разделения, открыла электронный челночный клапан и запустила насос. Впускной клапан (С1) остался открытым, в то время как другие впускные клапаны закрыты. Это вызывает торможение левого переднего колеса, в результате чего колесо теряет сцепление и уменьшается избыточная поворачиваемость.
Активное управление поворотом вокруг вертикальной оси, недостаточная управляемость
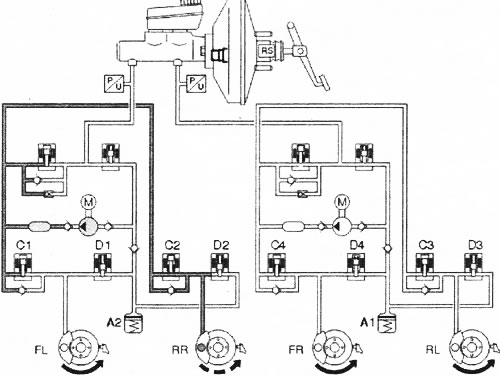
Недостаточная управляемость - это когда автомобиль продолжает ехать прямо, даже если рулевое колесо было повернуто. Недостаточная управляемость вызывается слишком большим ускорением. Когда управляемость автомобиля недостаточная, (ВСМ) передает запрос на уменьшение крутящего момента в (ЕСМ) по контроллерной локальной сети. В приведенном выше примере рулевое колесо повернуто вправо, однако автомобиль продолжает ехать прямо. Клапан разделения закрывается, электронный челночный клапан открывается, и насос запускается. Система DSTC тормозит правое заднее колесо, оставляя впускной клапан С2 открытым, и закрывая другие впускные клапаны (С1, СЗ и С4). Если торможение правого заднего колеса является недостаточным для того, чтобы вернуть автомобиль на курс, (ВСМ) открывает впускной клапан С4 и тормозит правое переднее колесо.
Контроль динамической устойчивости
Когда водитель тормозит во время активного управления поворотом вокруг вертикальной оси, (ВСМ) отпускает активный усилитель тормозов и увеличивает тормозное давление на короткое время, так как приоритет отдается поперечной устойчивости автомобиля. В вычисления включены желаемое водителем тормозное давление и функции для следующего: активное управление поворотом вокруг вертикальной оси, ABS, электронная система распределения тормозных сил, контроль устойчивости. В случае задействования ручного тормоза активируется функция нейтрализации управления поворотом вокруг вертикальной оси, если скорость превышает приблизительно 40 км/ч. При более низких скоростях управление поворотом вокруг вертикальной оси уменьшается последовательно, а при 20-25 км/ч будет незаметно. Функция самодиагностики для клапанов и электродвигателей насоса включается при скоростях выше 20 км/ч после нового цикла вождения. Функция самодиагностики для активного усилителя тормозов включается, когда скорость превышает 11 км/ч. Самодиагностика выполняется при каждом новом цикле вождения. Если водитель нажмет на педаль тормоза во время работы контроля устойчивости, модуль управления, посредством датчика давления педали в усилителе тормозов, учтет давление, произведенное водителем в контроле устойчивости.