
Модули управления в контроллерной локальной сети
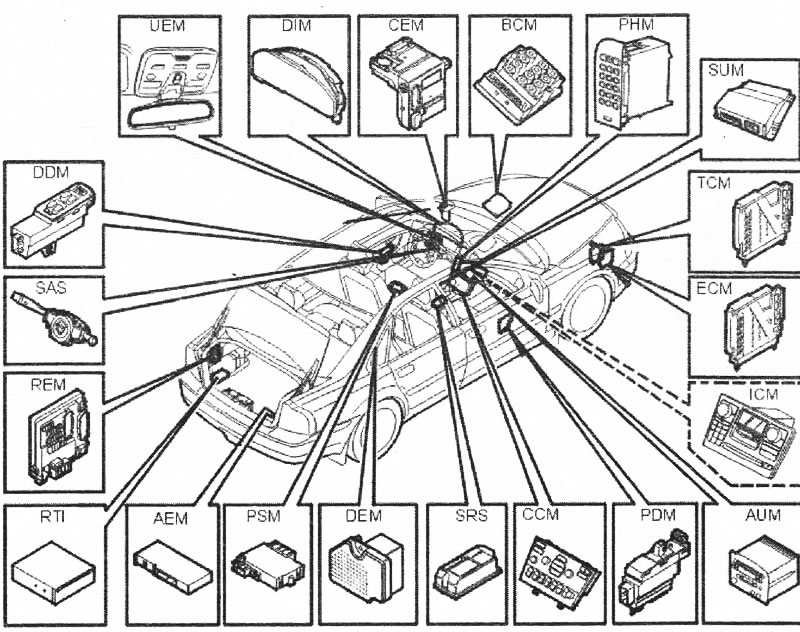
Количество модулей управления в локальной сети CAN зависит от модели автомобиля, уровня оснащенности и недели его конструкции. Недели конструкции и изготовления могут отличаться. Неделя изготовления - это неделя, на которой автомобиль изготовлен на заводе. Оснащение автомобиля определяется неделей конструкции. Неделя конструкции может перекрывать несколько недель изготовления. Неделя конструкции обозначается в формате ГГГГНН. Например, 199815-я неделя конструкции означает, что автомобиль имеет конструкцию 15 недели 1998 г.
Объяснение
Низкая скорость, контроллерная локальная сеть = Низкоскоростной участок локальной сети CAN (125 кбит/с)
Высокая скорость, контроллерная локальная сеть = Высокоскоростной участок локальной сети CAN (500 кбит/с)
Последовательность = Канал последовательной передачи данных (Volcano Lite) между подчиненным модулем управления и модулем управления локальной сети CAN (10,4 кбит/с). UN (9,6 кбит/с).
Подчиненный модуль управления = Модуль управления с низкой вычислительной способностью, который подсоединен к главному модулю управления и работает только согласно командам от главного модуля управления.
Стандартное оборудование = Вспомогательное оборудование, устанавливаемое на заводе согласно заказу при покупке нового автомобиля.
Вспомогательное оборудование = Послепродажная установка.
| Объяснение | |||
| Модуль управления | Название/Функция | Связь | Другие |
| Вспомогательный электронный модуль | Электронный модуль дополнительного оборудования (АЕМ). Управляет некоторыми дополнительными устройствами автомобиля. Этот модуль управления поддерживает связь с остальными модулями управления по низкоскоростному участку локальной сети | Низкая скорость, контроллерная локальная сеть | Вспомогательное оборудование |
| Модуль управления системы звуковоспроизведения | Модуль звуковоспроизведения (AUM). Управляет магнитолой/звуковоспроизводящим оборудованием и поддерживает связь с другими модулями через сектор низкой скорости сети | Низкая скорость, контроллерная локальная сеть | Стандартное/вспомогательное оборудование |
| Модуль управления тормозами | Модуль управления тормозами (ВСМ). Управляет функциями тормозной системы ABS/Электронная система распределения тормозных сил/DSTC (Система динамической устойчивости и контроля пробуксовки колес/STC (Система устойчивости и контроля пробуксовки колес) и поддерживает связь с другими модулями через сектор высокой скорости сети. Содержит прерывающий резистор для сети | Высокая скорость, контроллерная локальная сеть | - |
| Модуль системы управления микроклиматом | Модуль системы управления микроклиматом (ССМ). Управляет функциями системы управления микроклиматом и поддерживает связь с другими модулями через сеть сектора низкой скорости | Низкая скорость, контроллерная локальная сеть | STD/MCC/ECC |
| Центральный электронный модуль | (СЕМ) Этот модуль, являющийся основным модулем в локальной сети, служит интерфейсом между высокоскоростным и низкоскоростным участками сети. Данный модуль управления выполняет обширные задачи в системе электрооборудования и обеспечивает реализацию многочисленных функций | HS CAN/LS CAN | - |
| Модуль двери водителя | Модуль двери водителя (DDM). Управляет функциями двери водителя и поддерживает связь с другими модулями через сеть контура низкой скорости | Низкая скорость, контроллерная локальная сеть | - |
| DEM | Электронный модуль дифференциала (DEM). Управляет включением привода на четыре колеса и поддерживает связь с другими модулями через сеть контура низкой скорости | Высокая скорость, контроллерная локальная сеть | Вариант |
| Модуль снабжения водителя информацией | Модуль снабжения водителя информацией (DIM). Управляет функциями комбинированной приборной панели и поддерживает связь с другими модулями через сеть контура низкой скорости | Низкая скорость, контроллерная локальная сеть | - |
| Модуль управления двигателя | Модуль управления двигателя (ЕСМ). Управляет функциями двигателя и поддерживает связь с остальными модулями управления по высокоскоростному участку сети. Содержит согласующий резистор для высокоскоростного участка сети | Высокая скорость, контроллерная локальная сеть | Различные варианты в зависимости от двигателя |
| ICM | Модуль управления информационно-развлекательной системы (ICM). Управляет радиоприемником, навигацией и телефоном. Этот модуль является первичным при обмене данными по локальной сети MOST | Низкая скорость, контроллерная локальная сеть | - |
| Модуль двери пассажира | Модуль двери пассажира (PDM). Управляет функциями двери пассажира и поддерживает связь с другими модулями через сеть контура низкой скорости | Низкая скорость, контроллерная локальная сеть | - |
| Модуль автомобильного телефона | Модуль телефона (РИМ). Управляет функциями автомобильного телефона и поддерживает связь с другими модулями через сеть контура низкой скорости | Низкая скорость, контроллерная локальная сеть | - |
| Модуль сиденья с электроприводом | Модуль электроуправления сиденьем (PSM). Управляет положениями и функциями сиденья водителя. Поддерживает связь с другими модулями управления через контур низкой скорости на сети | Низкая скорость, контроллерная локальная сеть | Стандартный/дополнительный. Модуль сиденья с электроприводом (PSM) не проверяет подогрев сиденья и функцию надувной подушки безопасности SIPS (Системы защиты при боковом ударе) |
| Задний электронный модуль | (REM). Управляет электрическими устройствами в задней части автомобиля, поддерживает связь с остальными модулями по низкоскоростному участку локальной сети. Содержит прерывающий резистор для сети | Низкая скорость, контроллерная локальная сеть | - |
| Датчик угла рулевого управления | Модуль датчика угла рулевого колеса (SAS). Собирает информацию об угле рулевого управления и поддерживает связь с другими модулями управления при помощи контура высокой скорости на сети | Высокая скорость, контроллерная локальная сеть | Вариант. Используется в системе DSTC (Система динамической устойчивости и контроля пробуксовки колес) |
| SRS | Модуль надувных подушек безопасности (SRS). Управляет системой пассивной безопасности в случае аварии, поддерживает связь с остальными модулями по низкоскоростному участку локальной сети | Низкая скорость, контроллерная локальная сеть | - |
| Модуль управления КП | Модуль управления КП (ТСМ). Управляет АКПП и поддерживает связь с другими модулями через контур высокой скорости на сети | Высокая скорость, контроллерная локальная сеть | Только с АКПП |
| Верхний электронный модуль | (UEM). Управляет электрооборудованием, расположенным в верхней части салона. Также содержит приемник дистанционного управления. Поддерживает связь с остальными модулями управления по низкоскоростному участку локальной сети. Содержит прерывающий резистор для сети | Низкая скорость, контроллерная локальная сеть | Вмонтирован во внутреннее зеркало заднего вида. Существуют верхние электронные модули (UEM) двух типов: один из них имеет функцию автоматического затемнения, а второй не имеет этой функции |
Сеть
Повышающиеся требования в отношении улучшения функциональности автомобиля как со стороны законодательства, так и со стороны покупателей, привели к повышенной сложности автомобиля. Это, в свою очередь, способствовало развитию систем электрооборудования в направлении повышения их гибкости. В результате исследовательских работ создана локальная сеть CAN (CAN = Контроллерная локальная сеть). Локальная сеть позволяет передавать и принимать по одному кабелю большое количество различных команд и сообщений. Каждая команда или сообщение обычно нуждались в отдельных проводах. Локальная сеть позволила расширить функциональность системы без увеличения количества проводов. Число команд и сообщений, которые могут передаваться по локальной сети, зависит от скорости сети и длины сообще-ний/команд. Локальная сеть Volvo, базирующаяся на (CAN), способна передавать свыше 500 различных сигналов и около 100 сообщений (так называемых фреймов). Каждое сообщение может содержать несколько сигналов, например, сообщение на (REM) может содержать все необходимые сигналы для включения ламп задних фонарей.
Преимущества сети
Упрощение добавления функций и установки аксессуаров: Так как модули управления уже подсоединены друг к другу в сети, и в них легко добавить дополнительную информацию, все, что требуется, это: подсоединить датчики к ближайшему модулю управления, подсоединить управляемый компонент к ближайшему модулю управления, загрузить программное обеспечение, чтобы изменить конфигурацию и программирование сети. Длина проводки и число компонентов, имеющихся теперь в автомобиле - меньше, чем ранее. Примером этого может служить добавление системы поддержания выбранной скорости в автомобиль. До внедрения сети установка модулей управления, выключателей, вакуумных насосов, вакуумных усилителей, шлангов и кабельных жгутов была необходимой. При наличии сети необходима только установка выключателя и загрузка программного обеспечения, которая изменяет конфигурацию автомобиля.
Упрощение внедрения логических функций: Логические функции имеют следующую структуру: "если произошло это, необходимо сделать следующее". Например, система запрограммирована так, что в случае перегорания ламп задних фонарей по CAN на (DIM) передается сообщение для предупреждения водителя. Для внедрения вышеописанной логической функции достаточно перепрограммировать соответствующие модули управления: (REM) и (DIM). Введение логических функций не увеличивает количество компонентов и кабелей.
Упрощение адаптации системы к требованиям автовладельца и рынка сбыта: Функции могут меняться в соответствии с пожеланиями автовладельца и требованиями рынка сбыта. Для примера можно взять задние противотуманные фонари. В одних странах используются 2 задних противотуманных фонаря, а в других - только один, со стороны водителя. Раньше требовалось хранить запас различных запчастей для разных рынков сбыта. Сейчас же можно использовать одинаковые запчасти для всех рынков сбыта, выполняя программирование системы в соответствии с требованиями конкретного рынка сбыта.
Для программирования всего модельного ряда можно использовать единую базовую систему: Похожие сети (аппаратное обеспечение) могут быть использованы для большого количества различных автомобилей. Единственное, что отличает автомобили, это: компоненты (модули управления, управляемые датчиками компоненты, и т.д.), подсоединенные к системе, какие компоненты что делают, какие компонен-ты/функции являются стандартными / дополнительными / вспомогательными, конфигурация/программирование системы.
Структура сети
Сеть состоит из нескольких модулей управления (иногда называемых узлами), которые подсоединены друг к другу последовательно двумя кабелями связи. На каждый модуль управления отдельно подается электропитание, каждый отдельно заземлен и получает сообщения/команды по двум кабелям связи. В обеих сетях (сторонах высокой и низкой скорости) модули управления подсоединены последовательно. При разрыве цепи модули управления, находящиеся за разрывом цепи, не смогут обмениваться данными с другими частями сети.
Стороны высокой и низкой скорости в сети: Локальная сеть состоит из двух частей: высокоскоростного участка сети (HS CAN), по которому передаются сигналы/сообще-ния между (СЕМ) и, главным образом, модулями управления в моторном отсеке, и низкоскоростного участка сети (LS CAN), по которому передаются сигналы/сообщения между (СЕМ) и модулями управления в салоне и багажном отделении. Интерфейс между высокоскоростным и низкоскоростным участками локальной сети обеспечивается (СЕМ), который ускоряет или замедляет передачу данных между участками сети.
Скорости передачи: Контроллерная локальная сеть Volvo имеет 2 скорости передачи. Участок локальной сети HS CAN (высокоскоростной) обеспечивает скорость передачи данных 500 кбит/с. Участок локальной сети LS CAN (низкоскоростной) обеспечивает скорость передачи данных 125 кбит/с. 1 кбит/с = 1024 битов в секунду (1 байт = 8 битов). Последовательная передача данных (Volcano Lite) между основными и подчиненными модулями управления осуществляется на скорости 10,4 кбит/с. Есть и другой стандарт последовательной передачи данных, называемый LIN. Этот стандарт, который является международным, приобретает все более широкое распространение. Он почти полностью идентичен Volcano Lite. Отличаются только метод и скорость передачи данных. Скорость передачи данных для LIN равна 9,6 кбит/с.
Прерывающий резистор: Для подавления электрических отражений и помех в CAN установлены согласующие резисторы (по одному на каждом окончании высокоскоростного и низкоскоростного участков локальной сети), которые обеспечивают сопряжение CAN Н и CAN L локальной сети. Каждый согласующий резистор имеет сопротивление 120 Ом. На участке HS CAN (высокоскоростном) локальной сети согласующие резисторы находятся в (ВСМ) и в (ЕСМ). На участке LS CAN (низкоскоростном) локальной сети согласующие резисторы находятся в верхнем электронном модуле (UEM) и в (REM). Оба прерывающих резистора создают параллельный контур. Упомянутые резисторы могут быть измерены при определенных условиях: сопротивление целостной CAN приблизительно равно 60 Ом; в случае обрыва проводов сопротивление локальной сети приблизительно равно 120 Ом; в случае короткого замыкания между коммуникационными проводами сопротивление локальной сети приблизительно равно 0 Ом.
Контроллерная локальная сеть
Локальная сеть CAN (Контроллерная локальная сеть) представляет собой стандартизованную систему мультиплексной связи. Мультиплексная связь обеспечивает возможность передачи сообщений между модулями управления по одному проводу так, что сеансы обмена данными между различными модулями управления не прерывают друг друга. Компания Volvo разработала новый стандарт мультиплексной связи, который получил название VOLCANO. VOLCANO, являясь результатом усовершенствования CAN, функционирует в реальном масштабе времени с назначением приоритетов. Характеристику назначения приоритетов называют CAN, но базируется она на VOLCANO. Стандарт для контроллерной локальной сети указывает: что должны использоваться 2 кабеля (CAN Н и CAN L), какие должны использоваться уровни напряжения, как должно выглядеть сообщение, как нужно поступать с ошибками при передаче.
Кабели CAN Н и CAN L
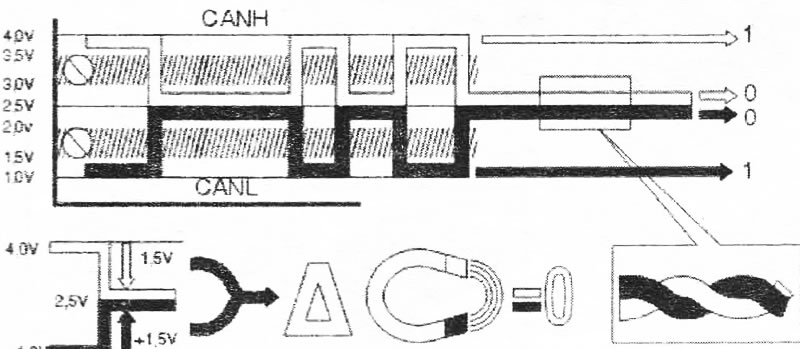
Не следует путать обозначения кабелей CAN Н и CAN L с параметрами HS CAN и LS CAN, которые характеризуют скорость передачи данных по локальной сети CAN. CAN Н и CAN L - это обозначения кабелей, которые используются для распределения сигналов в локальной сети мультиплексной передачи данных. Передача данных осуществляется по паре проводов. Используется витая пара проводов с медными жилами. Для передачи данных используются сигналы различного уровня напряжения. Витые пары проводов и сигналы различного уровня напряжения позволяют снизить чувствительность сети к помехам. Одно и то же сообщение передается одновременно по обоим кабелям, но используются различные уровни напряжения. Двоичный 0 = 2,5 В на CAN Н и на CAN L. Двоичная 1 = 4 В на CAN Н и 1 В на CAN L. При измерении напряжения между CAN L и "массой" среднее значение приблизительно равно 2,3 В. При измерении напряжения между CAN Н и "массой" среднее значение приблизительно равно 2,8 В. При измерении напряжения между двумя проводами локальной сети CAN при нормальном трафике среднее значение приблизительно равно 0,5 В.
Сообщение контроллерной локальной сети

Сообщение состоит из следующих компонентов: идентификатор ("флаг"), обозначающий идентичность и приоритет сообщения, информация о данных (значение, информация и т.д.), контрольная сумма, используется для того, чтобы убедиться в том, что сообщение было получено правильно, сигнал остановки, который показывает, что сообщение закончилось. Полное сообщение контроллерной зоны называется конвертом.
Установка приоритетов
Когда несколько модулей управления одновременно хотят послать сообщение, в сети могут происходить конфликты. Например, когда водитель нажимает на педаль тормоза в то же время, когда пассажир изменяет установочные параметры управления микроклиматом, а пассажир на заднем сиденье открывает окно с сервоприводом стекла. Сообщения функций безопасности должны иметь приоритет. Кроме этого, задержки в случае возникновения очереди должны ограничиваться разумными пределами. То есть работа системы не должна казаться водителю "вялой" или замедленной. Чтобы разрешить проблемы, касающиеся конфликтов и временных задержек, имеется приоритетный порядок сообщений, с тем чтобы обеспечить хорошую функциональность. Установление приоритетов для сообщений определяется количеством нулей в начале сообщения, чем больше нулей, тем выше приоритет. Установление приоритетов происходит следующим образом. Когда работает сеть, все модули управления, располагающие информацией для передачи, посылают сообщения с битом один. Все модули управления регистрируют, что было передано по сети. Если модуль управления передал 0, те, которые передали 1, останавливаются и ждут следующего раза, когда будет доступна сеть. Те, которые передали 0, передают бит 2 сообщения. Если модуль управления передал 0, как бит 2, те, которые передали 1, останавливаются и ждут следующего раза, когда будет доступна сеть, и т.д. Сообщение с высшим приоритетом (имеющее больше нулей в начале) получает преимущество и отсылается первым. Конец сообщения - это семь нулей. Модули управления затем знают, что сеть доступна, и новое сообщение может быть послано в порядке очередности.
Два типа сообщений
В системе имеется 2 типа сообщений. Периодические фреймы. Эти фреймы, посылаемые регулярно, несут информацию о состоянии какого-либо параметра. Они используются для часто обновляемой информации, например, для сигналов скорости. Фреймы событий посылаются только в случае выполнения заданных условий. Сообщения этого типа используются для нечастых операций, к которым относится, например, подъем/опускание оконных стекол. Сообщение может содержать бит обновления, который показывает, насколько "свежей" является информация. Система предполагает, что приемник получил сообщение, поэтому подтверждение не посылается (ответ посылается только на прямой вопрос от другого модуля управления). Однако получатель "знает", как часто должно приходить сообщение о текущем состоянии. В случае отсутствия этого сообщения получатель может запустить аварийную программу и/или зарегистрировать код неисправности. Код неисправности может регистрироваться и в тех случаях, когда получивший сообщение модуль управления не может "понять" это сообщение. Примерами могут служить неустойчивые короткие замыкания между одним из проводов локальной сети CAN и электропитанием (+) или "массой".
Совместимость
Блоки должны "говорить" на одном и том же языке и должны быть совместимы друг с другом. Для этого используется стандартизированный протокол связи. Конфигурация сигналов (sfg) включает язык обмена данными между модулями. Если какой-либо модуль имеет конфигурацию сигналов, отличающуюся от конфигурации сигналов остальных модулей, он не сможет поддерживать связь с остальными модулями. Поэтому все модули должны иметь совместимую конфигурацию сигналов. Иногда конфигурация сигналов меняется при добавлении новых сообщений и удалении старых.
Конфигурация
Когда выполняется конфигурация системы, загружаются инструкции, касающиеся следующего: какие модули управления, входят в систему (например, (СЕМ) и другие), назначение модулей управления (например, "этот модуль управления для двери водителя - этот модуль управления для двери пассажира"), какие функции должны включаться (например, должна функция сигнализации быть включена или выключена), какие компоненты подсоединены к модулям управления (например, включен в сигнализацию датчик наклона или нет), какие сообщения модуль управления должен передавать, а какие принимать, где должны храниться различные данные. В памяти (СЕМ) хранится информация о том, какие модули управления установлены в данном автомобиле. Эта информация передается из центральной базы данных Volvo при загрузке программного обеспечения. В памяти (СЕМ) также содержится информация о первичной конфигурации сигналов в данном автомобиле. Информация о конфигурации сигналов автомобиля должна сохраняться в памяти всех модулей управления, подсоединенных к локальной сети CAN, чтобы они могли осуществлять первичный обмен данными. Конфигурация сигналов входит в состав программного обеспечения, загружаемого после установки или замены модуля управления. После загрузки программного обеспечения в модуль управления происходит автоматическое обновление информации в модуле управления, например, записываются данные о подсоединении нового аксессуара. После загрузки программного обеспечения можно изменить значения некоторых параметров по желанию автовладельца, например, включить/отключить световое подтверждение запирания и отпирания автомобиля или отрегулировать степень затемнения внутреннего зеркала заднего вида. Эти настройки могут сбрасываться при загрузке нового программного обеспечения. Программное обеспечение загружается с помощью Диспетчера программ. Даже если 2 автомобиля выглядят идентичными, они могут вести себя по-разному из-за разной конфигурации, параметр мог быть модифицирован клиентом или работником станции ТО.
Действия при появлении ошибки в контроллерной локальной сети
(СЕМ) осуществляет мониторинг локальной сети CAN. Если (СЕМ) обнаруживает неисправность в локальной сети CAN, в памяти (СЕМ) регистрируется код неисправности. Для неисправностей разных типов существуют различные типы кодов неисправностей. Типы обрабатываемых ошибок: электрические неисправности, данные от модуля управления не поступают, не соответствует идентификационному коду, посылаемому (СЕМ), в памяти модуля управления с неправильной конфигурацией сигналов записывается код неисправности. Модуль управления, зарегистрировавший этот код неисправности, прерывает связь по CAN, но будет продолжать мониторинг трафика и останется доступным для диагностического обмена данными.
Электрические неисправности: Если (СЕМ) обнаруживает, что уровни сигнала по коммуникационному проводу на (СЕМ) выходят за пределы нормы, в памяти (СЕМ) регистрируется код неисправности. Каждый коммуникационный провод на (СЕМ), CAN L и CAN Н высокоскоростного участка сети, а также CAN L и CAN Н низкоскоростного участка сети подвергается проверке. На каждом проводе обнаруживается 2 различных уровня: короткое замыкание на электропитание (+) или короткое замыкание на "массу". Поскольку (СЕМ) может также определять наличие короткого замыкания одного или нескольких проводов, он может обнаруживать и короткие замыкания между двумя проводами CAN в одной части локальной сети. Это дает восемь кодов неисправности для регистрации электрических неисправностей. (СЕМ) не может регистрировать коды неисправностей для обрыва проводов CAN. Однако в этом случае могут регистрировать другие коды неисправностей.
(Источник статьи доступен на портале: Autoinstruction.ru)
Данные от модуля управления не поступают: (СЕМ) имеет информацию о том, какие модули управления должны присутствовать в локальной сети CAN, и регулярно проверяет, все ли модули управления поддерживают связь. Если какой-либо модуль управления не поддерживает связь по CAN, в памяти (СЕМ) регистрируется код неисправности. Для каждого модуля управления в локальной сети CAN имеется характерный код неисправности.
Нарушение связи: Каждый модуль управления, кроме (СЕМ), имеет код неисправности двух типов ((СЕМ) имеет код неисправности только одного типа). Ими являются: ошибочные сообщения, ошибка конфигурации (отсутствует в (СЕМ)).
Ошибочные сообщения: Если модуль управления несколько раз передает в своих сообщениях ошибочные сигналы, модуль управления прерывает связь. Модуль управления как бы переходит в автономный режйм. Код неисправности хранится в памяти модуля управления, который передал ошибочные сообщения и прервал связь по CAN. Благодаря этому данный модуль управления не будет создавать помех для прочего обмена данными по CAN. Если неисправность устойчивая, то из-за невозможности обмена данными с модулем управления, прервавшим связь, считывание кодов неисправностей будет невозможным, пока на данный модуль управления подается электропитание. Если после отключения электропитания модуля управления (например/посредством выключения зажигания или извлечения предохранителя цепи питания) на этот модуль управления, зарегистрировавший код неисправности, снова подается электропитание, он будет пытаться восстановить связь. Поэтому при поиске таких неисправностей важно знать, какой вид электропитания использует соответствующий модуль управления.
Ошибка в конфигурации: (СЕМ) регулярно посылает контрольные сообщения на все модули управления в CAN. Эти сообщения содержат, в частности, идентификационный код конфигурации сигналов, используемой в настоящий момент. Это связано с тем, что для обеспечения возможности связи все модули управления в CAN должны иметь одинаковую конфигурацию сигналов. Если идентификационный код конфигурации сигналов одного из модулей управления