
Когда система помощи при парковке задним ходом активирована, модуль управления системы включает светодиодный индикатор в кнопке выключателя, включает датчики и отдаёт команду на подачу одиночного звукового сигнала, подтверждающего включение системы. Если в радиусе действия датчика появляется предмет, то при включённой системе немедленно раздаётся последовательность звуковых предупреждающих сигналов.
Если работа системы помощи при парковке не требуется, то ее можно на время отключить, нажав на кнопку выключателя. Для автомобилей, оснащенных только задними датчиками, систему можно снова включить, нажав еще раз на выключатель или выключив и снова включив зажигание. После этого система автоматически включится при выборе передачи заднего хода. Система остается активной при переключении с заднего хода в нейтральное положение. Этим учитывается вероятность того, водитель продолжит (каким-либо способом) перемещать автомобиль назад, поставив коробку передач в нейтральное положение.
При подсоединении прицепа модуль системы помощи при парковке получает сигнал по шине CAN от центральной электрораспределительной коробки. Получив такой сигнал, модуль управления системой помощи при парковке приостанавливает функционирование системы.
На автомобилях, оснащенных передними и задними датчиками, система помощи при парковке автоматически активируется, если включено зажигание (положение II), селектор не находится в положении Park и выключен электронный стояночный тормоз. При скорости движения свыше 10 км/ч передняя система помощи при парковке отключается. При снижении скорости движения до 6 км/ч работа передней системы помощи при парковке возобновляется. Если включается электронный стояночный тормоз (EPB) или селектор ставится в положение Park, система помощи при парковке выключается.
Работа датчиков
Модуль системы помощи при парковке анализирует данные, получаемые от датчиков с целью выявления препятствий в поле действия датчиков. Если препятствия не обнаружены, система помощи при парковке не подает никаких звуковых сигналов. Если было обнаружено препятствие, динамик системы помощи при парковке выдаст серию звуковых сигналов.
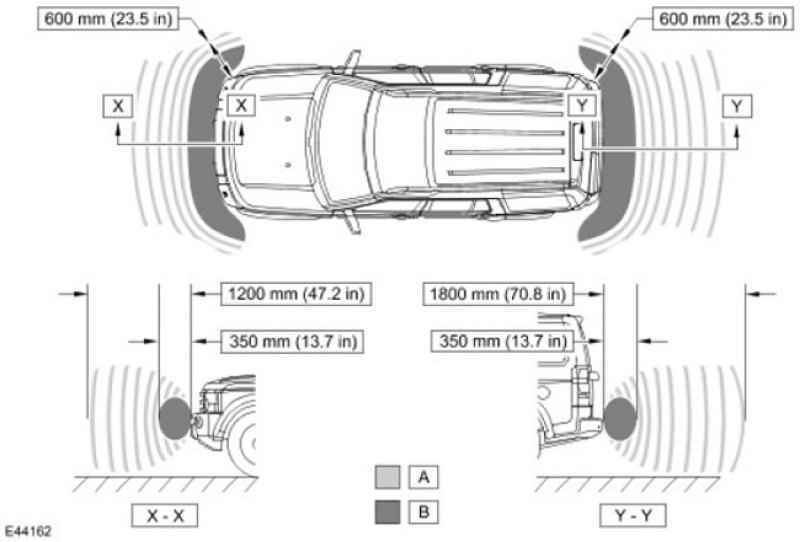
Максимальное расстояние обнаружения препятствий равно 1800 мм. При обнаружении препятствия, по мере приближения к нему промежуток между звуковыми сигналами уменьшается, и на расстоянии приблизительно 350 мм от препятствия звуковой сигнал становится непрерывным.
Если с момента обнаружения препятствия дальнейшее уменьшение расстояния между препятствием и центральными датчиками не происходит, то промежуток между подачей звуковых сигналов не меняется. Если объект обнаружен только одним крайним датчиком, предупреждающий сигнал прекратится через 5 секунд, если не произойдёт изменения расстояния от объекта до крайнего датчика.
Зона обнаружения
| Наименование пункта | Каталожный номер запасной части | Описание |
| A | - | Прерывистый предупреждающий звуковой сигнал |
| B | - | Непрерывный предупреждающий звуковой сигнал |
Обнаружение препятствия и вычисление расстояния до него
Работая в комбинированном режиме приема/передачи, датчик излучает ультразвуковые импульсы и принимает отраженные от препятствия сигналы. Модуль управления системой помощи при парковке усиливает отраженные сигналы и сравнивает их с заложенными в программе пороговыми значениями для вычисления расстояния. Это достигается определением времени, прошедшим между передачей и приёмом ультразвукового сигнала.
Когда датчик работает в режиме приёма, он принимает сигналы излучения соседнего датчика. Этот режим используется для повышения точности работы системы.
Цикл обнаружения препятствия состоит в передаче и приеме серии импульсов одним датчиком, работающим в комбинированном режиме по командам модуля управления системой помощи при парковке. . Затем компьютер переключает этот, а также соседние датчики в режим только приема отраженного сигнала. После короткой паузы операция повторяется, но теперь в комбинированном режиме работает следующий датчик. Цикл продолжается, пока все 4 датчика не излучат ультразвуковые сигналы. На это требуется около 100 миллисекунд. Модуль управления выполняет несколько измерений сигналов одного и того же датчика, чтобы исключить случайные ошибки при вычислениях.
Если объект находится строго напротив датчика, расстояние рассчитывается по времени между передачей и приёмом сигнала. Если же препятствие расположено между двумя датчиками, модуль управления вычисляет расстояние по сигналам двух датчиков, решая задачу триангуляции.
Для решения задачи триангуляции модулю управления должно быть известно расстояние между отдельными датчиками в бампере. Эта информация хранится в памяти модуля управления. Зная расстояния от каждого датчика до препятствия и расстояние между соседними датчиками, модуль управления может вычислить минимальное расстояние от бампера автомобиля до препятствия.
При подъезде автомобиля одновременно к нескольким препятствиям модуль управления определяет расстояние до ближайшего из них.