

Экспериментальные автономные Volvo ездят в обычном трафике. Шведы говорят, что цель проверки — создание таких машин-роботов, которые можно без опасений отдавать в руки простых покупателей, а не только испытателей.
Запущенный более года назад проект Drive Me привел к появлению необычайно развитой системы. Один из авторов Drive Me Эрик Келинг говорит: «Относительно легко построить и продемонстрировать автономный концепт-кар. Но если вы хотите получить эффект в реальном мире, вам придется разработать и выстроить сложную систему, которая будет безопасной, надежной и доступной для обычных клиентов». Первые автономные машины в рамках проекта испытываются сейчас в Гетеборге. Ну а тем временем шведы подвели итоги первого года работы и раскрыли детали.

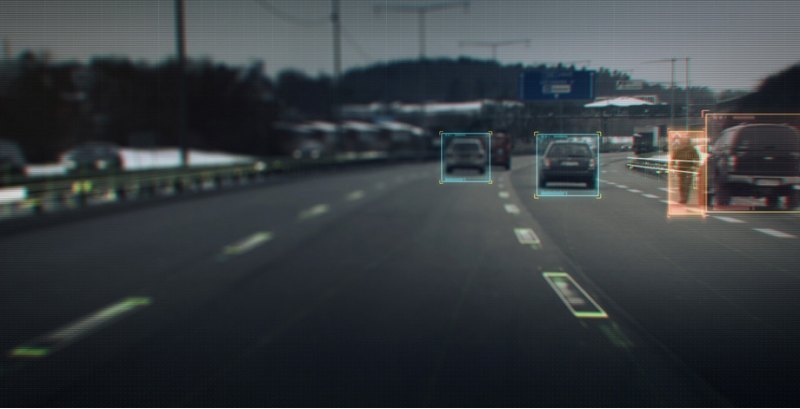
Шведские легковушки не только видят все вокруг на 360 градусов, различают машины и пешеходов. Компьютер помещает объекты на подробную 3D-карту, где также отмечены полосы, съезды, туннели, кривизна дороги, перепады высот, ограждения, знаки. Причем объекты размещены с точностью до сантиметров, а информация автоматически пополняется через облачный сервис.
Свое местоположение машина фиксирует при помощи высокоточной спутниковой навигации, дополненной трехосевым акселерометром и гироскопом. Карту местности машина постоянно обновляет. При этом она подключена к центру контроля движения и в реальном времени получает информацию об окружающем трафике, временных ограничениях скорости и временно установленных знаках. Операторы центра контроля имеют возможность связываться с водителями автономных машин и в аварийных ситуациях заранее предупреждать их о необходимости перехода на ручное управление.
Автономные Volvo контролируют развитие ситуации на дороге. Если система советует человеку перехватить управление, а он не реагирует, легковушка начнет искать поблизости безопасное место для аварийной остановки. Это же происходит и в конце заданного маршрута. Если точка финиша не указана, автомобиль не будет останавливаться прямо посреди дороги, а поищет безопасное место на обочине или съезд.
В сценарии работы комплекса нельзя рассчитывать на то, что водитель сможет взять на себя управление в непредвиденной ситуации или при какой-либо поломке. Конечно, человек будет находиться за рулем, но все программы и «железо» строятся так, как будто его в этой системе вообще нет. Даже 99-процентная надежность разработчиков не устраивала. Вероятность сбоя должна быть нулевой, говорят в Volvo. А это означает дублирование ключевых систем (как в авиации) и софт, способный анализировать и прогнозировать развитие событий, далеко выходящих за пределы типовых.
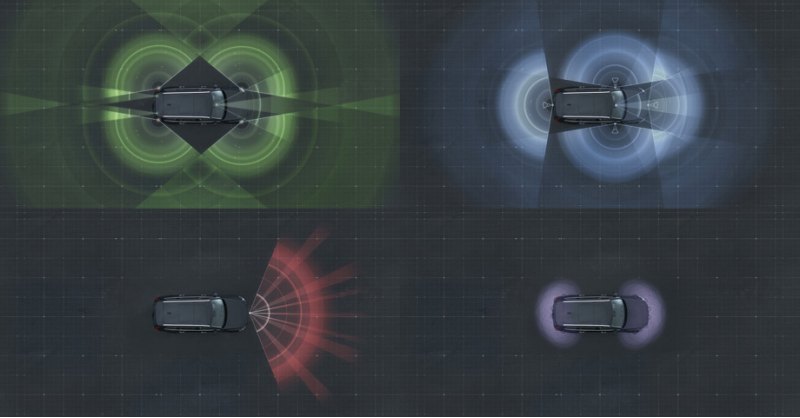
Сильнее всего в шведском комплексе впечатляет набор сенсоров, воспринимающих обстановку. Кажется, такого их числа мы еще не видели. Загибайте пальцы: семь радаров с различными углом охвата и дальностью действия (зеленый цвет), восемь камер (голубой цвет), лазерный сканер (красный) и двенадцать ультразвуковых датчиков (фиолетовый).
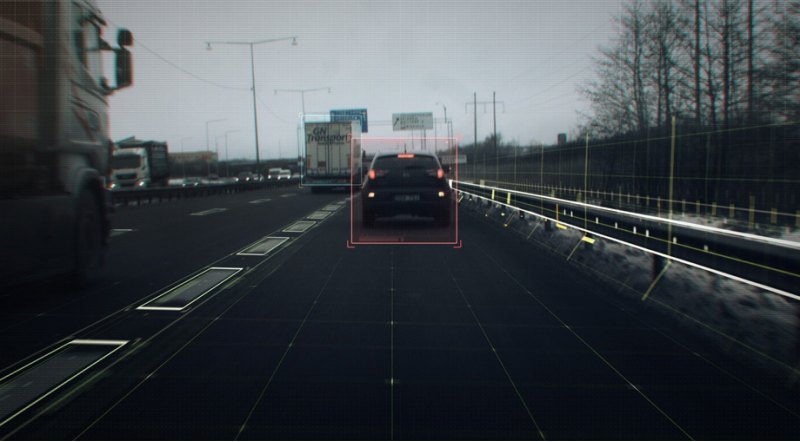
Подробно авторы системы рассказали о том, как именно машина видит все вокруг. Начинается все с фронтального блока камеры с радаром, установленного за лобовым стеклом. Он считывает знаки и определяет основные объекты перед машиной. Фронтальный радар дополняют еще четыре, размещенные по углам бамперов. Они контролируют положение соседних машин и заодно определяют столбы, стены туннелей, ограждения трассы и так далее. Еще два радара дальнего диапазона встроены в задний бампер. Они видят приближающиеся сзади автомобили на большом расстоянии даже на других полосах, что помогает принимать решения при перестроении.

Основной фронтальный радар и камера в одном блоке. Угловой радар средней дальности. Задний дальнобойный радар.
Четыре камеры ближнего диапазона встроены в зеркала, решетку радиатора и задний бампер. Они отслеживают ближние предметы и разметку и способны мгновенно подстраиваться под резкое изменение освещенности (например, при въезде в туннель). За лобовым стеклом также размещена дополнительная трифокальная камера. Фактически это три камеры в одном устройстве, поясняют шведы. Одна формирует картинку в широком поле зрения (140 градусов), вторая — в среднем угле (45 градусов) и третья — в узком секторе (34 градуса), но зато на большом расстоянии перед машиной. Эта тройная камера дополняет основную фронтальную и помогает автомобилю видеть другие машины и, главное, пешеходов на дороге и тротуаре.

Камеры ближнего диапазона и фронтальная трифокальная камера.
Двенадцать ультразвуковых сенсоров (по шесть в каждом бампере) обеспечивают системе еще одно ближнее поле зрения. Эти датчики похожи на обычные парковочные, но обладают улучшенной обработкой сигнала и «видят» проходящих мимо людей. Наконец, еще один канал получения информации — лазерный сканер, установленный ниже решетки радиатора. Он охватывает угол 140 градусов и действует на расстоянии до 150 метров. При этом у него высокая точность определения координат и размеров объектов.
Всего экспериментальный автомобиль объединяет данные с 28 датчиков, чтобы воспринимать окружающий мир. Их зоны ответственности пересекаются, а разные физические принципы позволяют говорить о приличной надежности в условиях плохой видимости, при загрязнении камер или отказе части сенсоров.
Информация доступна на портале: www.autoinstruction.ru
«Мы вступаем на неизведанную территорию, — заявил Питер Мертенс, старший вице-президент по исследованиям и развитию Volvo Car Group, представивший разработку. — Автономное вождение в корне изменит наш взгляд на передвижение. Оно превратит упущенные часы ежедневных поездок во время для работы и развлечений». К 2017 году число автономных Volvo на дорогах Гетеборга должно быть доведено до ста, причем за рулем будут рядовые клиенты. Это будет решающая проверка идеи перед внедрением в практику (наряду с тестами на новом полигоне).
Источник: drive.ru